5/14に行われましたB4の導入実験発表会について,B4の永井が報告いたします.
4月に研究室に配属されて以降,古典制御や現代制御を学習することを目的とした導入実験を行ってきました.導入実験は LEGO 社の Lego mindstorms NXT 2.0 を用いて行い,それぞれが自由にロボットの設計を行いました.先輩方に助けていただきながら,ロボットの設計や発表資料の作成を行い,各自個性的なロボットを作製しました.以下,発表順にそれぞれのロボットを簡単に紹介します.
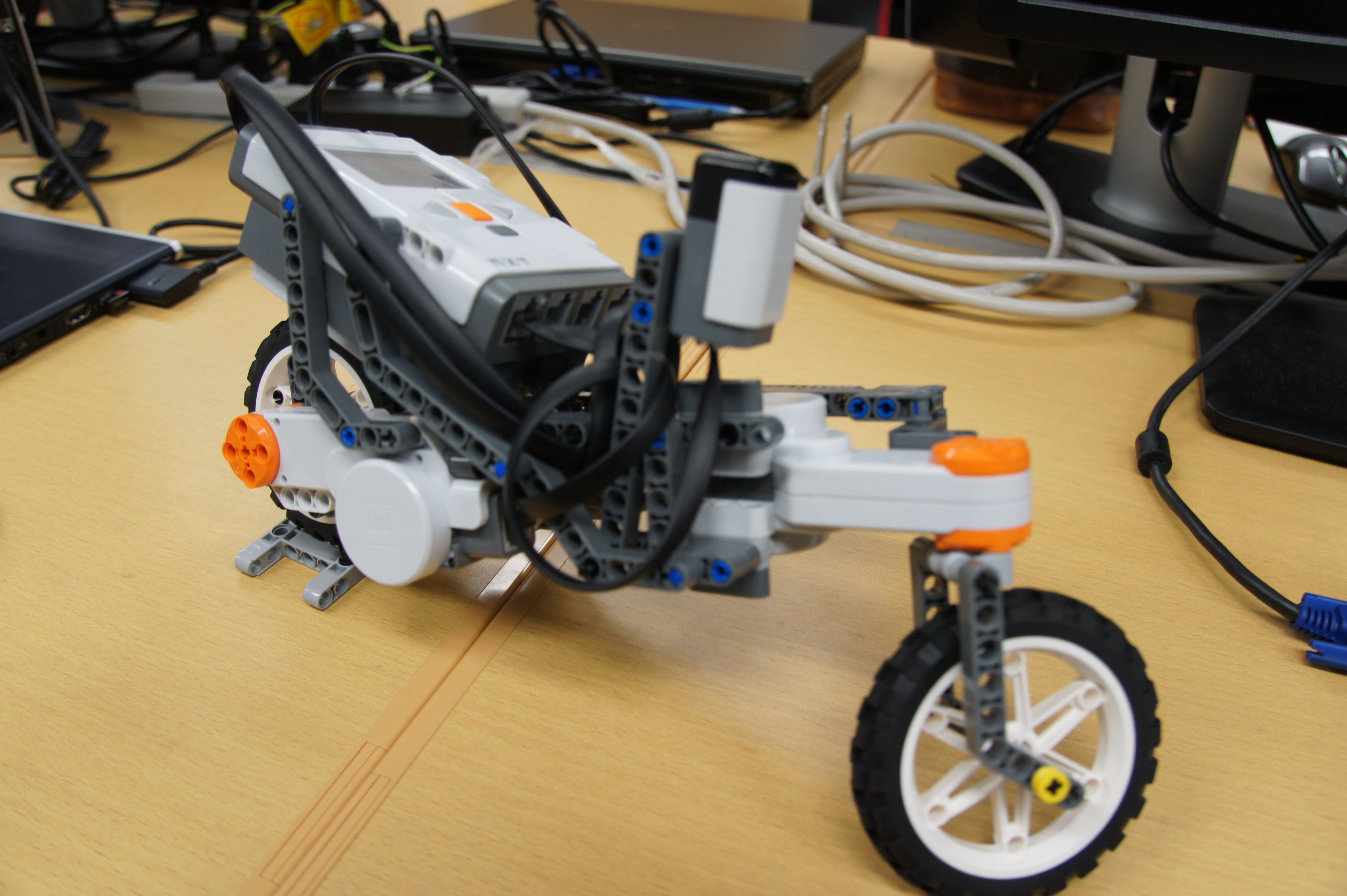
彦野:状態フィードバックによる前輪操舵自転車型ロボットの安定走行
自転車型ロボットを作製し,現代制御を行うことで安定な走行を目指しました.残念ながら走行は実現しませんでしたが,現代制御を勉強するよい機会となりました.
菅谷:PID制御を用いた音源検知ロボット
音センサおよび超音波センサを搭載したロボットを作製しました.これは音源のある方向を検知し,その場所に向かっていくという動作を行います.この制御にはPID制御を用いています.

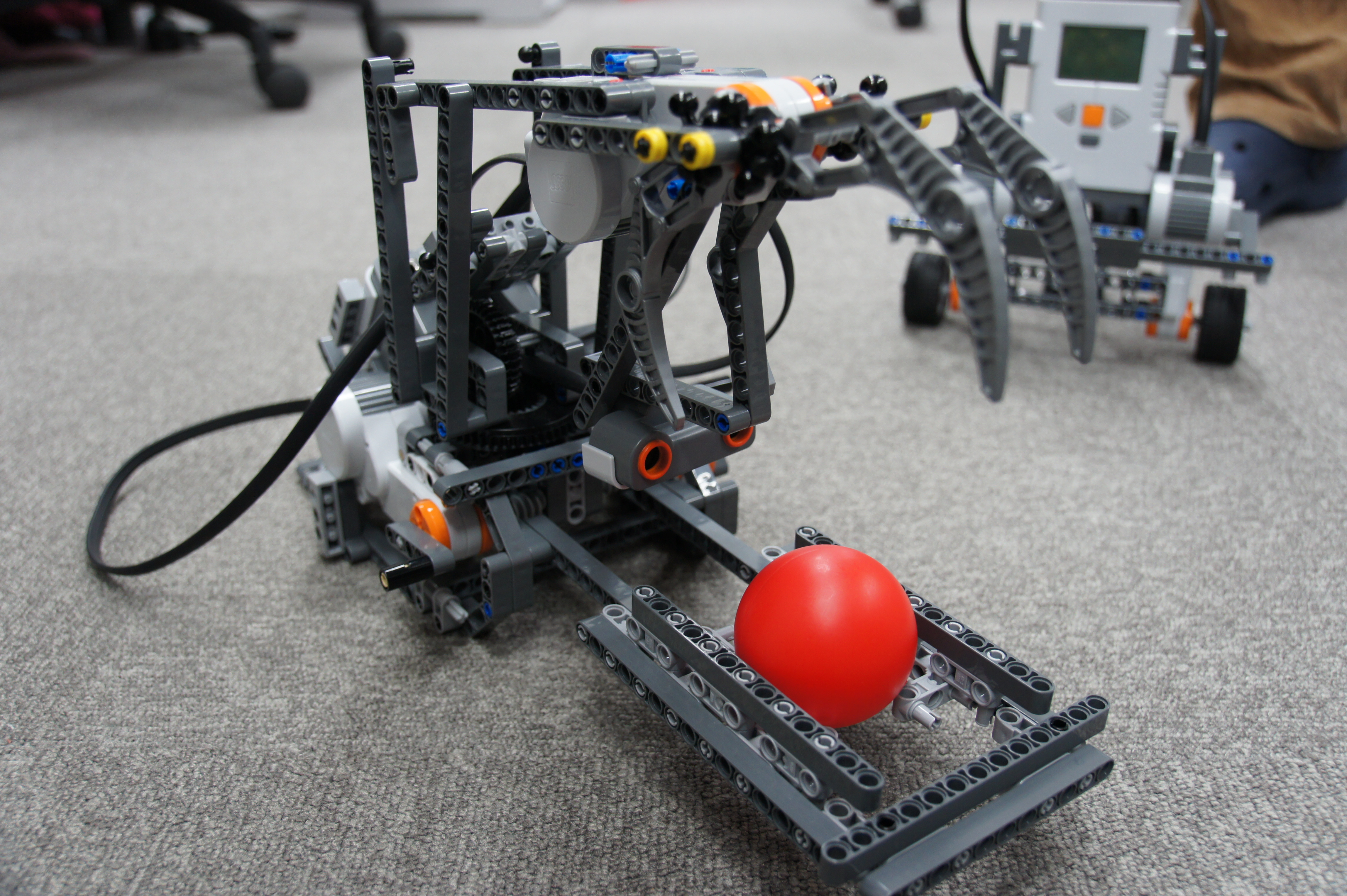
井上:PID制御を用いたLEGO MINDSTORMSによるボールの検知及び輸送
超音波センサを搭載したロボットで,センサによりボールを検知し,ボールをつかんで運ぶという動作を行います.ボールまでの角度とアームの角度をPID制御を用いています.「足立研技能賞」を受賞しました.
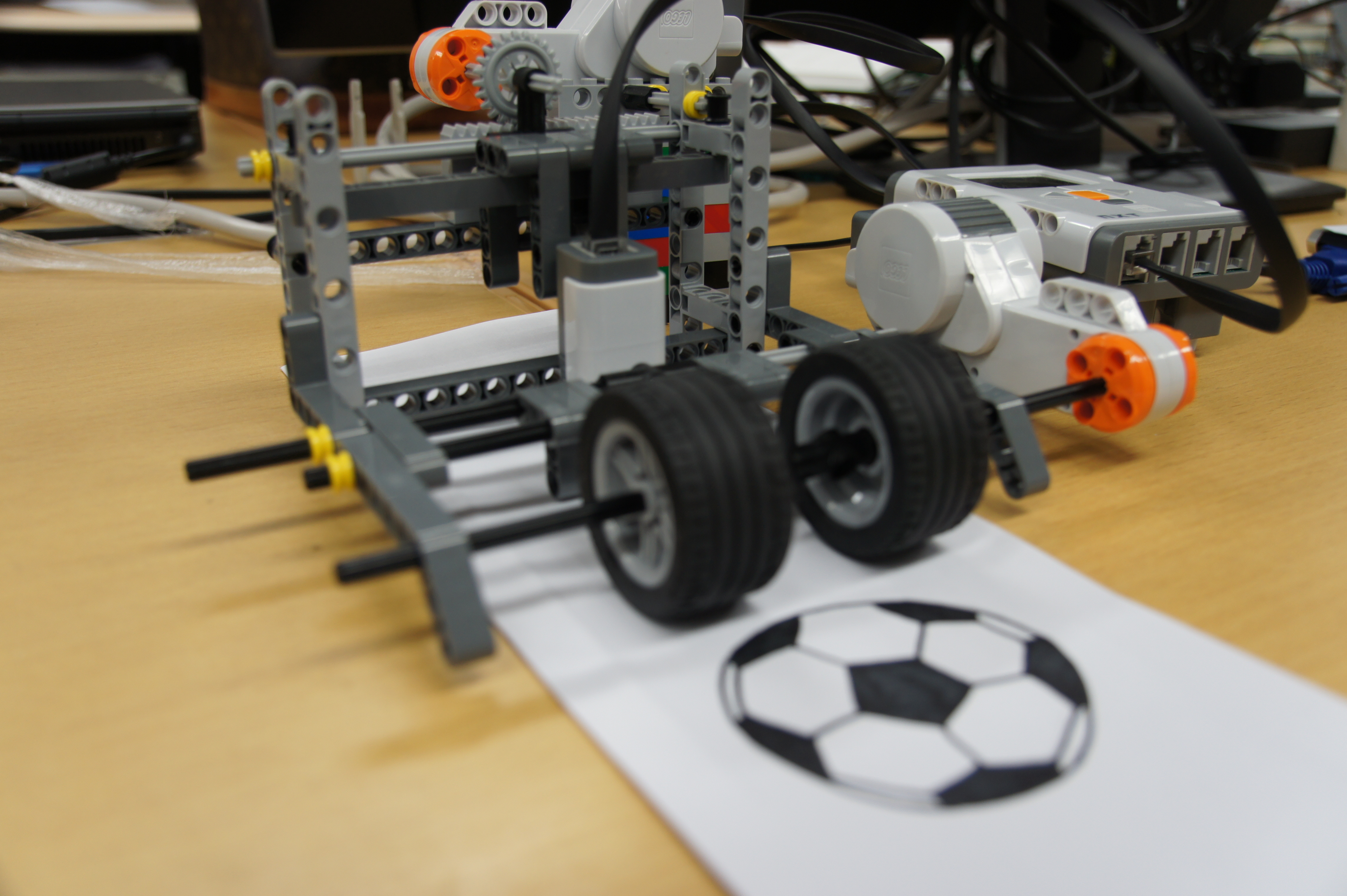
永井:PID制御を用いたスキャナロボット
光センサを搭載したロボットで,PID制御を用いてモータに取り付けた光センサを左右に動かし,画像データの読み取りを行います.「高村主任賞」を受賞しました.
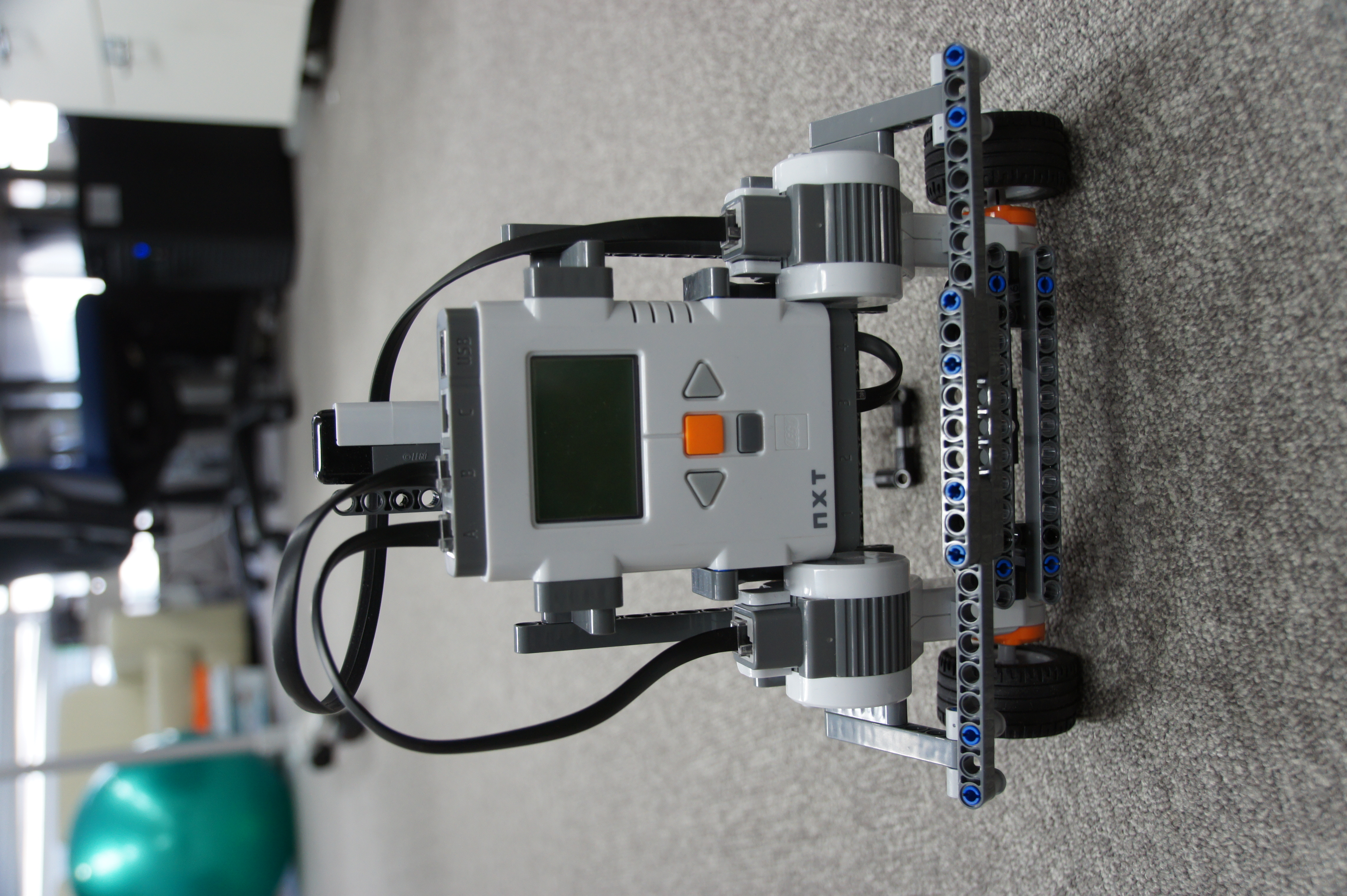
森川:二輪型倒立振子ロボットのモデリングと最適レギュレータを用いた制御系設計
不安定系である二輪型倒立振子ロボットを作製し,最適レギュレータを用いて制御系を設計し,車体を安定化させました.「足立研イグノーベル賞 (?)」を受賞しました.
今回の実験で多くのことを学ぶことができました.導入実験も終わり,今後はそれぞれの卒業研究テーマに沿った勉強や実験を行うこととなります.この経験を生かし,卒業研究に励みたいと思います.





-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*
足立研に配属されたB4学生5名が3月末から約1か月半にわたって行ってきた LEGO Mindstorms の導入実験発表会について,永井さんに記事を書いてもらいました。
この導入実験では MATLAB/Simulink の使用法,LaTeX を用いた技術文書の作成,そして実験装置の取り扱いなどを学んでくれました。私の注文の多い内容に対して,5名とも GW や土日を返上して素晴らしい作品を作ってくれましたが,大学院生の公正な投票により審査を行った結果,今年はスキャナロボットを作成した永井さんが最優秀賞(高村主任賞)を受賞しました。また,井上さんと森川君が技能賞とアイディア賞(足立研イグノーベル賞)を受賞しました。
4年生の今後の活躍が大変楽しみです。 【足立記】