 5/16 に行なわれました B4 の導入実験発表会について, B4 の浦田が報告いたします。
5/16 に行なわれました B4 の導入実験発表会について, B4 の浦田が報告いたします。
4月に研究室に配属されて以降,古典制御や現代制御理論の学習及び MATLAB や Simulink,Tex などのソフトウェアの使い方の学習を目的とした導入実験を行ってきました. 導入実験は LEGO 社の Lego mindstorm NXT 2.0 を用いて行い,それぞれが自由にロボットの設計を行いました. 先輩方に助けていただたきながら,ロボットの設計や TeX による発表資料の作成を行い,各自個性的なロボットを作製しました.
以下,発表順にそれぞれのロボットの概要を簡単に紹介します.
阿部: 状態フィードバックと状態オブザーバによる2輪型倒立振子の制御系設計

2輪型倒立振子ロボットを作製し,状態フィードバックとオブザーバを用いて車体の安定化を目指しました. 残念ながら,車体の安定化を実現させることはできませんでした. しかし,現代制御理論の勉強する良い機会となりました.
佐藤: PID 制御を用いたライントレースロボット

このロボットは搭載された光センサの情報を用いて, 滑らかにライン上を走る動作を行います. 優秀賞(井上正樹賞)を受賞しました.
吉田: 状態オブザーバを用いたハンドル操舵型バイクロボット
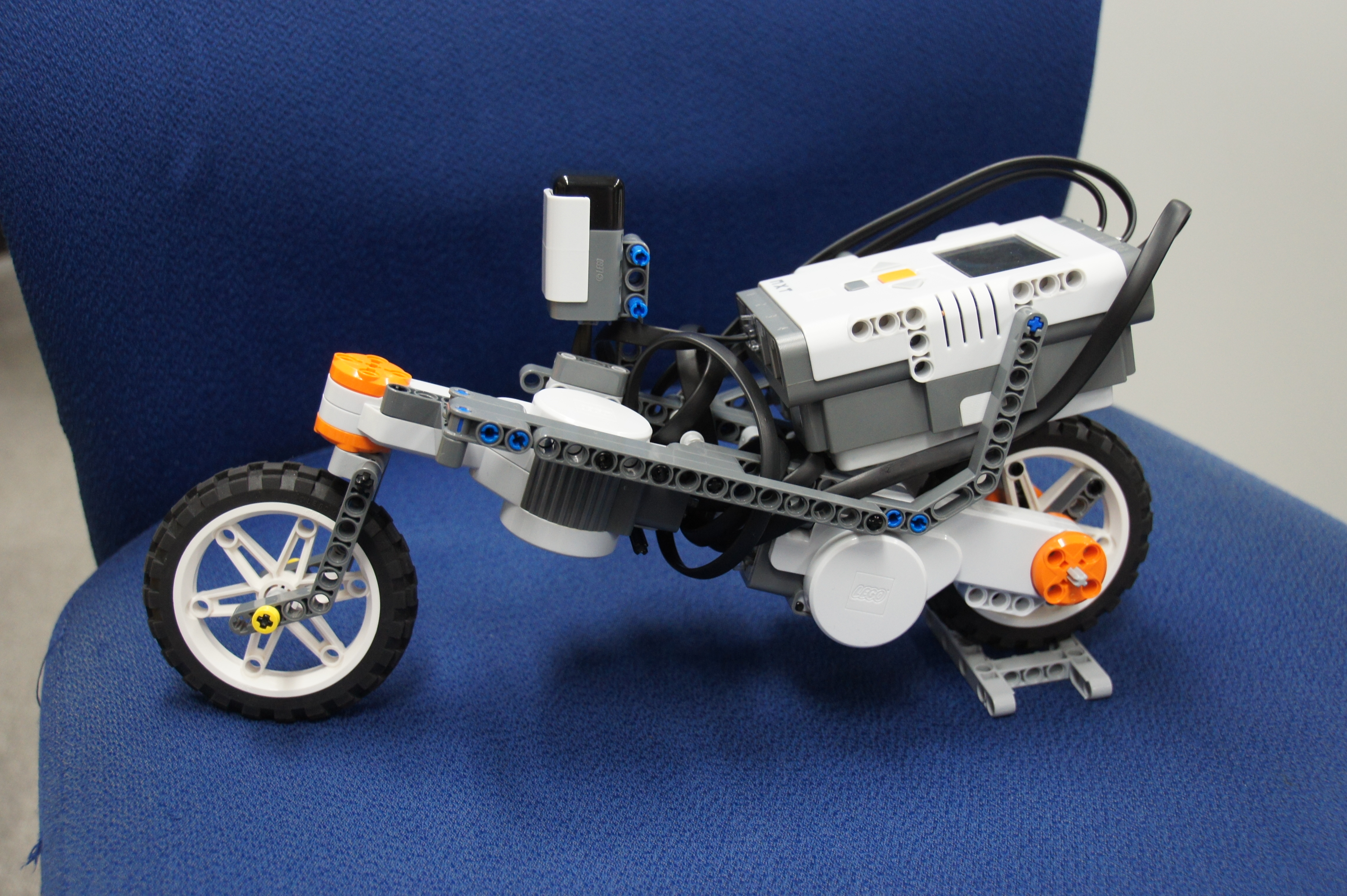
ハンドル型操舵型バイクロボットを作製し,安定な走行を目指しました. 残念ながら,安定した走行は実現できませんでしたが,現代制御を勉強する良い機会となりました.
浦田: サーボ系理論を用いた2輪型倒立振子ロボットの制御系設計

このロボットは車体を安定しつつ,目標の距離走行させた後,停止する動作を行います. 最優秀賞(足立賞)を受賞しました.
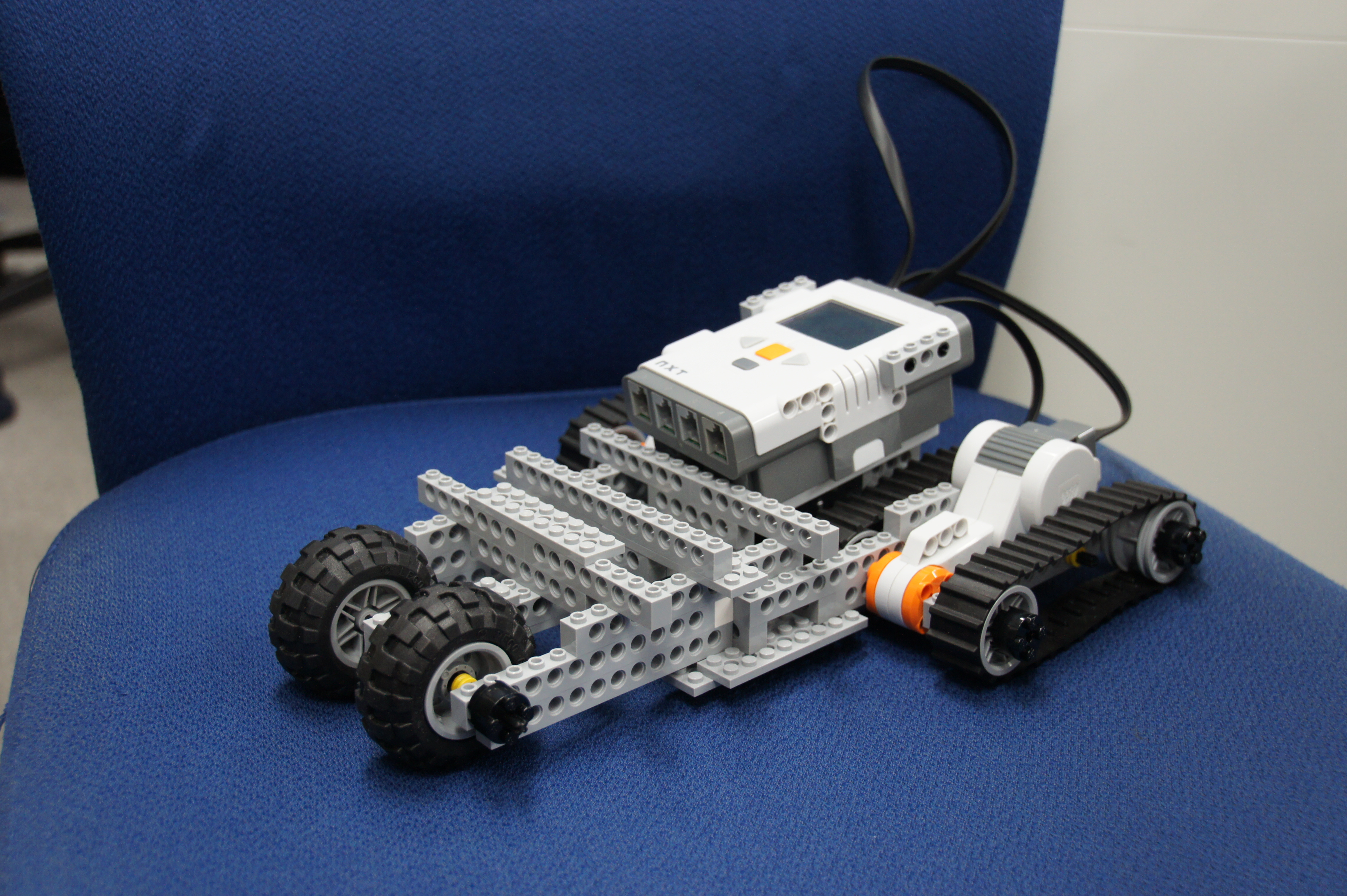
松林: PID制御を用いた一定速度走行ロボット

一定速度で走行しながら障害物を弾くという動作をするロボットの作製を行いました. PID制御を用いて一定速度の走行の動作は実現できましたが,障害物を弾くという動作はできませんでした.
幾田: 線形カルマンフィルタおよびRGB-D画像時系列を利用した3Dマッピングロボットの製作
このロボットは画像を用いて部屋の3D地図を作製します. 本番では実演できませんでしたが, カルマンフィルタについて勉強することができました.
今回の導入実験を通じ, 実機実装の難しさや制御理論など多くのことを学ぶことができました. 導入実験を終え、今後はそれぞれの卒業研究テーマに従って研究をしていくことになります. 今回学んだことを活かし, 同期内で切磋琢磨しながら卒業研究に励みたいと思います.


