今年度の4月から9月まで,システムデザイン工学科の高橋研究室と共同で行なった CanSat プロジェクトについて,B4 の阿部が報告致します.
昨年度に引き続き,今年度は私が足立研から高橋研で行なっている CanSat プロジェクトに参加しました.
CanSat とは,毎年アメリカネバダ州のブラックロック砂漠で行なわれる競技です.ロケットで自律走行を行なう小型ローバを打ち上げ,パラシュートを用いて降下,着陸を行ないます.その後,自律的に指定されたゴールを目指します(宇宙兄弟でも取り上げられたので知っている方もいるかもしれません).
今回作製した CanSat の機体を図に示します.今年の機体は「クワッドコプター + 2輪ローバ」で,4つのプロペラの推力を用いて走行を行なうものです.これは,ブラックロック砂漠で機体が走行している様子です.

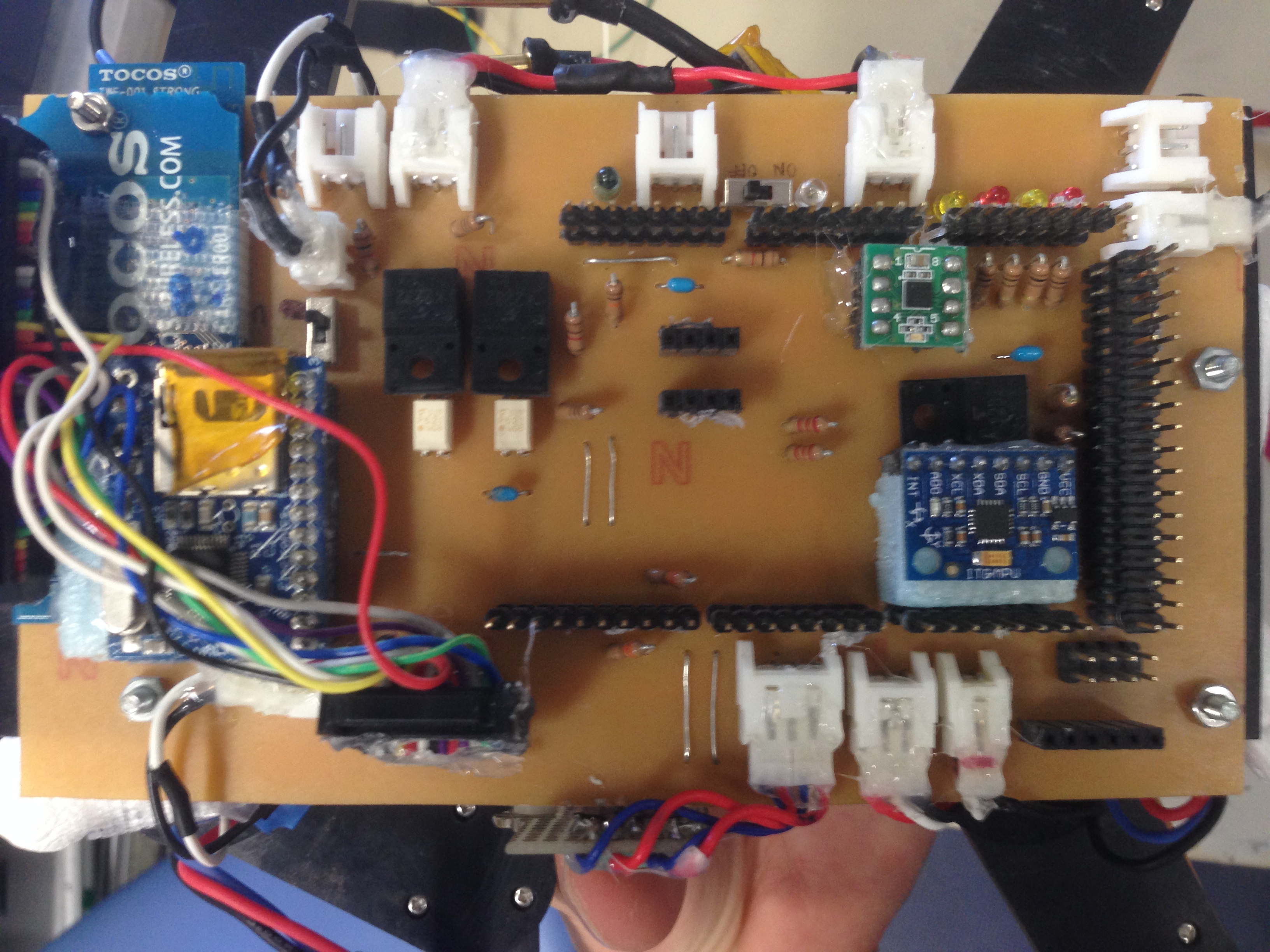
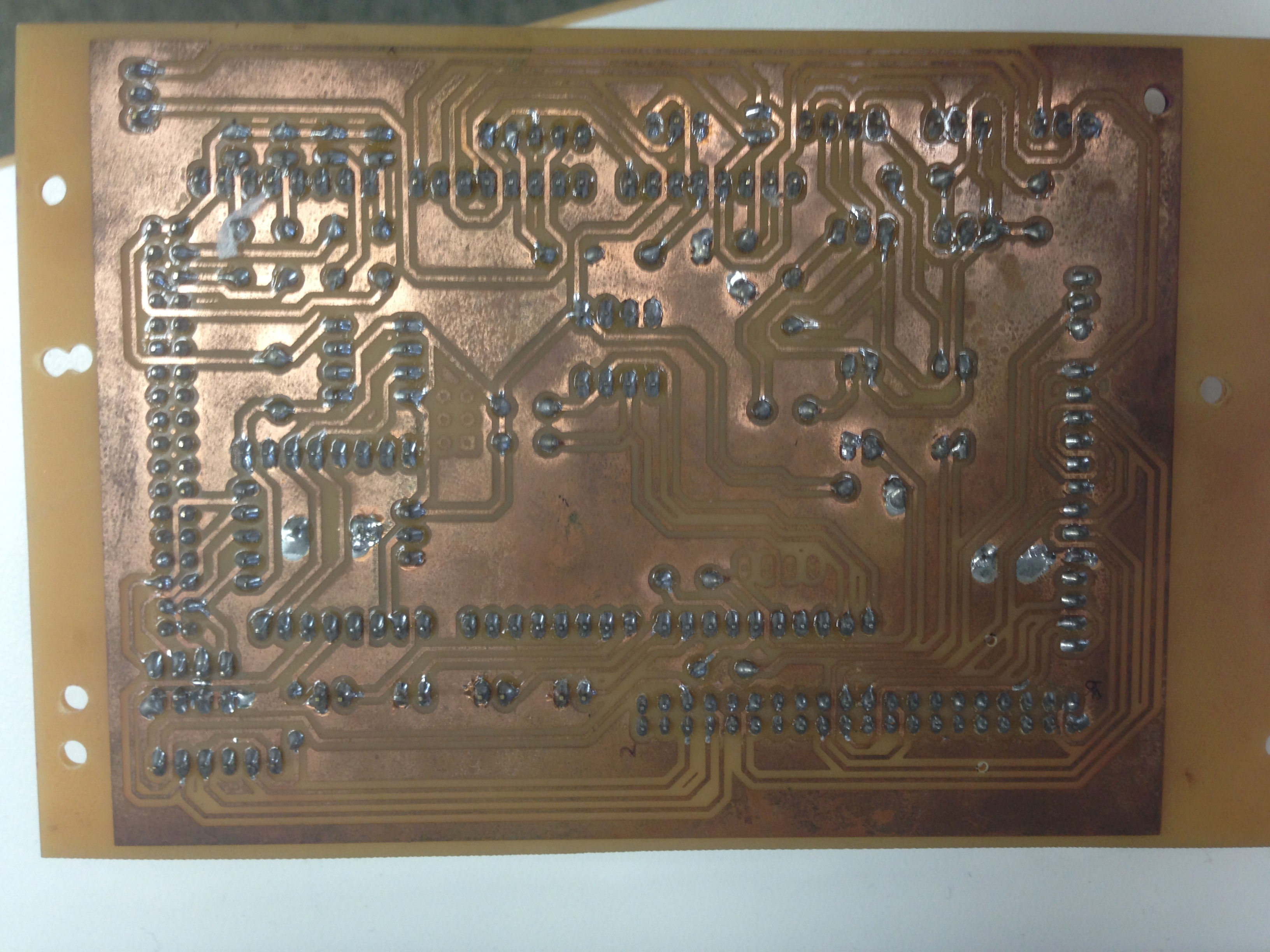
私はこの CanSat の中の,主に回路部分を担当しました.今回,回路設計からエッチング,ハンダ付けの一連の流れを全て行ないました.今回作製した回路が下図です.
今回の CanSat 活動を通じてソフトだけではなく,足立研では全くやっていないハード開発を経験することができました.今後,この経験を活かして研究を行なっていきたいです.